Tango Sentio
12 May 2018 -Tango Sentio is a 3D scanning glove. The name is derived from Latin tango: touching, and sentio: seeing. No, I don’t speak Latin but I can google until I find something that sounds interesting enough.
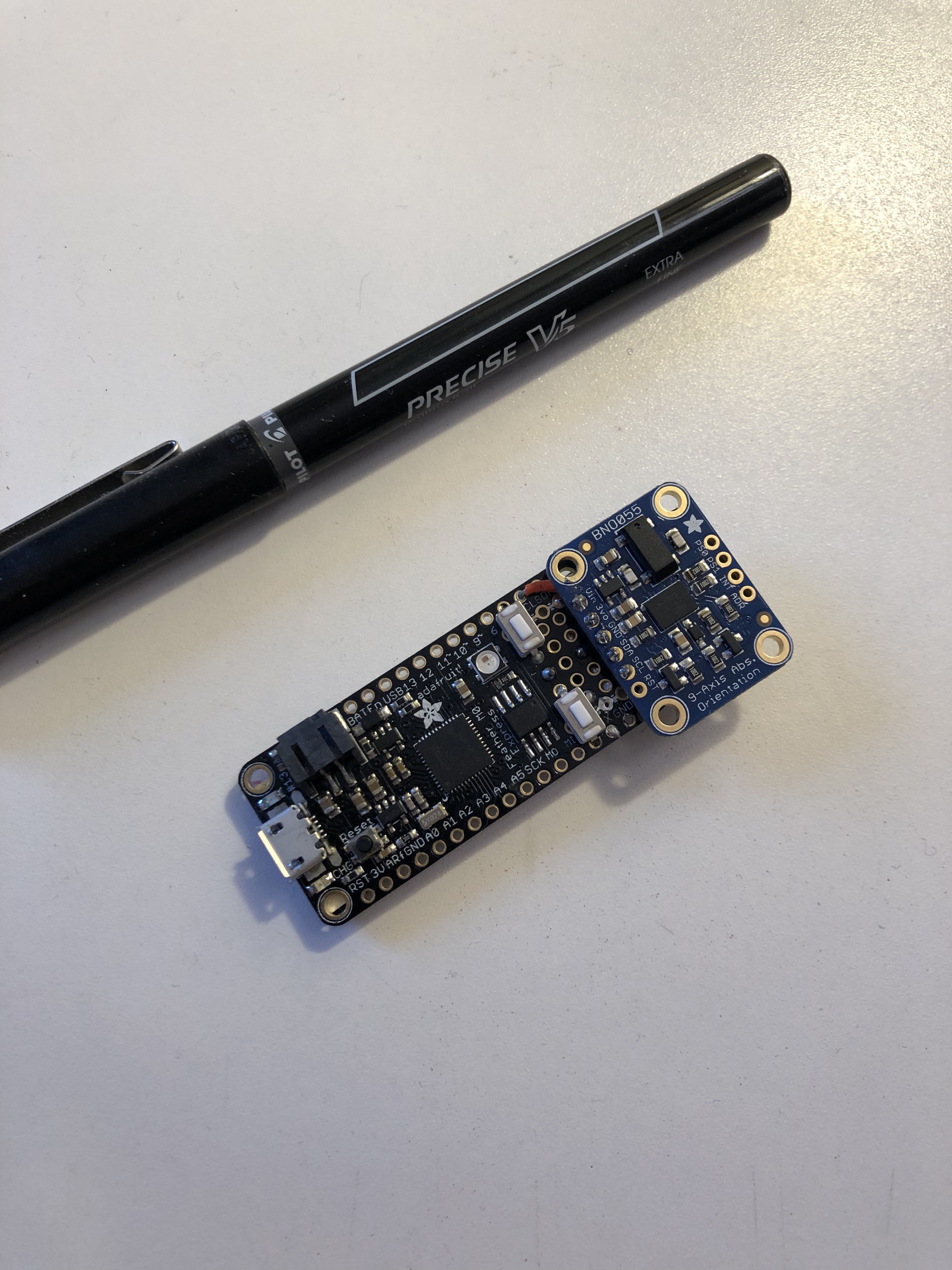
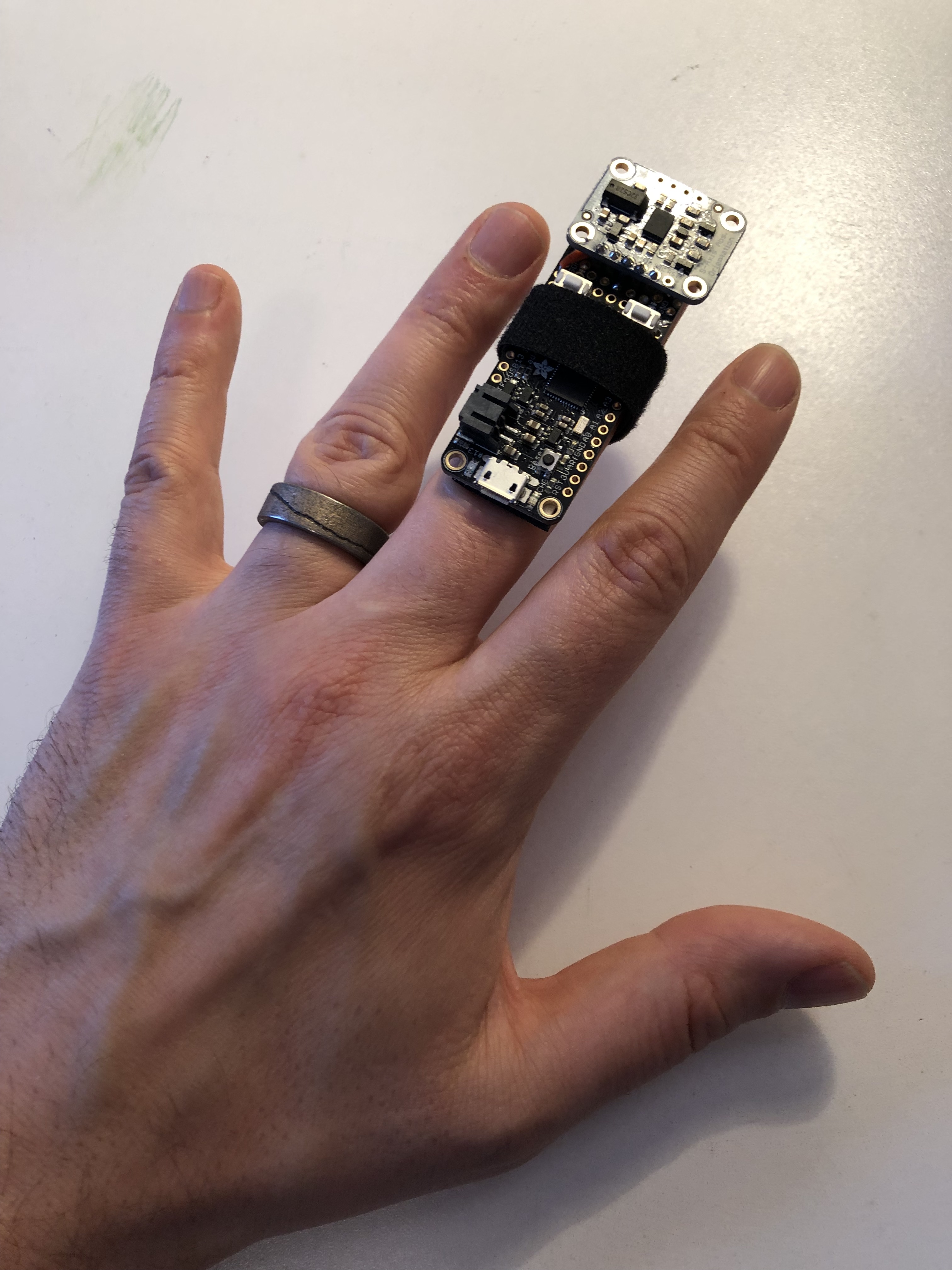
I’m using the Bosch BNO055 Absolute Orientation 9-DOF sensor. The device straps to your hand and scans an object as you move across the surface. The scan is then imported in to Rhinoceros and multiple scans can be combined to create a full 3D model.
At the time of this posting I haven’t completed the software to prove/disprove if this concept will work. Accelerometers are not a good way to calculate position although a number of factors make me think we can overcome the shortcomings. First, each pass starts at a known location (0,0,0) and goes pretty quickly, so the degradation of accuracy over time is minimized. Second, the resulting line is loaded in to the 3D modeling software where Katie can assess it and let me know if I need to redo the pass. Efficient, no, but that’s not the point here.
I originally used Circuit Python but without interrupts I was too limited to do everything I wanted to do. I switched to an arduino client and moved all calculations in to a server app written in Python.
Images: